潛龍二號
發(fā)布日期:2019-06-12 13:40:41
“潛龍二號”全名:“潛龍二號”自主水下機器人。是“十二五”國家863計劃深海潛水器裝備與技術(shù)重大項目課題之一,中國大洋礦產(chǎn)資源研究開(kāi)發(fā)協(xié)會(huì )組織實(shí)施,中國科學(xué)院沈陽(yáng)自動(dòng)化研究所為技術(shù)總體單位,與國家海洋局第二海洋研究所等單位共同研制。這是一套集成熱液異常探測、微地形地貌探測、海底照相和磁力探測等技術(shù)的實(shí)用化深海探測系統,主要用于多金屬硫化物等深海礦產(chǎn)資源的勘探作業(yè)。

2018年4月6日,執行中國大洋49航次科考任務(wù)的“潛龍二號”無(wú)人潛水器成功完成第50次下潛。
研發(fā)背景
“潛龍二號”是國家“863”計劃“深海潛水器技術(shù)與裝備”重大項目的課題之一,由中國大洋礦產(chǎn)資源研究開(kāi)發(fā)協(xié)會(huì )組織實(shí)施,中科院沈陽(yáng)自動(dòng)化所作為技術(shù)總體單位,與國家海洋局第二海洋研究所等單位共同研制。“潛龍二號”在6000米級auv“潛龍一號”的基礎上,針對多金屬硫化物礦區需求研制,在機動(dòng)性、避碰能力、快速三維地形地貌成圖、浮力材料國產(chǎn)化方面均有較大提高,為我國海底多金屬硫化物調查和勘探提供了高效、精細、綜合的先進(jìn)手段。
研發(fā)背景
“潛龍二號”是國家“863”計劃“深海潛水器技術(shù)與裝備”重大項目的課題之一,由中國大洋礦產(chǎn)資源研究開(kāi)發(fā)協(xié)會(huì )組織實(shí)施,中科院沈陽(yáng)自動(dòng)化所作為技術(shù)總體單位,與國家海洋局第二海洋研究所等單位共同研制。“潛龍二號”在6000米級auv“潛龍一號”的基礎上,針對多金屬硫化物礦區需求研制,在機動(dòng)性、避碰能力、快速三維地形地貌成圖、浮力材料國產(chǎn)化方面均有較大提高,為我國海底多金屬硫化物調查和勘探提供了高效、精細、綜合的先進(jìn)手段。
設計人員
劉健“潛龍二號”總設計師、“潛龍一號”課題負責人,中科院沈陽(yáng)自動(dòng)化研究所水下機器人研究室總工,曾擔任我國早期“CR-02 6000米自治水下機器人”總設計師。
發(fā)展歷程
為了最大限度地提高科研效率、節約科研經(jīng)費,大洋40航次的調研隊員正式開(kāi)始了“晝夜不分、黑白顛倒”的生活,AUV(4500米級深海資源自主勘查系統)組、熱液異常探測組、地球物理組、地質(zhì)組、綜合作業(yè)組、甲板保障組等調研組長(cháng)充分考慮了可能出現的一切意外情況,均制定了穩妥的值班表,確保每一個(gè)時(shí)間段、每一間實(shí)驗室都有至少一人在值班、巡查。
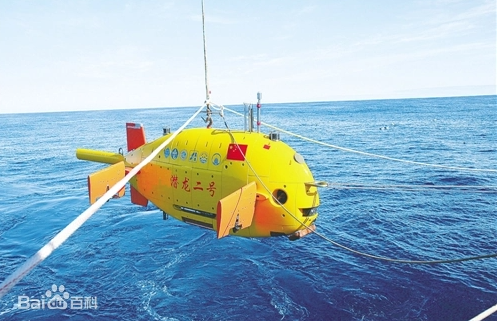
“潛龍二號”雖然名字里帶“龍”,但造型卻酷似電影《海底總動(dòng)員》里的小丑魚(yú)NEMO。相關(guān)負責人表示,把潛器設計成魚(yú)的樣子主要是為了適應洋中脊復雜地形的要求,讓潛器自如翻山越嶺,便于水面回收,減少垂直面的阻力,增強水面航行能力。
為應對水下復雜的地形地貌,“潛龍二號”在國內首次采用前視聲吶作為避碰控制設備。這是一種成像聲吶,即把數據采集進(jìn)來(lái)后,通過(guò)圖像處理方式來(lái)識別障礙和周?chē)h(huán)境,結合避碰策略,下達緊急轉向、緊急變深或變高以及跟蹤策略。在解除危機后,會(huì )通過(guò)在線(xiàn)路徑規劃引導潛器回到正確的軌跡上,使其繼續正常地執行任務(wù)。
2015年12月16日,執行我國第四十航次科考任務(wù)的“向陽(yáng)紅10號”起航,兩臺4500米級深海水下機器人“潛龍一號”和“潛龍二號”隨船出發(fā),首次投入實(shí)質(zhì)性遠洋科考。
在經(jīng)過(guò)3個(gè)潛次的試驗調試后, 2016年1月20日零時(shí)30分,我國自主研發(fā)的4500米級深海資源自主勘查系統(AUV)——“潛龍二號”在西南印度洋完成了第5次大洋下潛勘探,全部探測功能測試取得成功。“潛龍二號”總設計師劉健介紹說(shuō),在第5次下潛中,“潛龍二號”進(jìn)行了全部探測功能測試,拍攝了300余張海底高清照片,獲得甲烷、濁度、溫度、磁力等海底環(huán)境參數數據,以及近底50米微地形地貌有效數據,達到預期目的。
2016年2月15日,西南印度洋,科考船“向陽(yáng)紅10號”攜帶的起重機掛鉤成功鉤住了鮮黃、魚(yú)形的深海潛水器“潛龍二號”,并將之緩緩送上后甲板。藉此,我國首臺自主研發(fā)的面向神秘的大洋熱液區探測的4500米級自主水下機器人的首次試驗性應用任務(wù)成功完成,意味著(zhù)其已開(kāi)始為我國勘探西南印度洋海底資源,調查極為復雜的海底地形地貌做出貢獻。
勘探過(guò)程
經(jīng)過(guò)9日一天的布陣、測陣及2016年1月10日天一大早的準備工作,“潛龍二號”的處女航已經(jīng)全部準備就緒,以往沒(méi)有安裝的磁力儀也已安裝完畢,呈現出它最完整的優(yōu)雅姿態(tài),陽(yáng)光下的“潛龍二號”顯得典雅又美麗。
當地時(shí)間2016年1月12日早上8點(diǎn),在止蕩繩的牽引下,“潛龍二號”緩緩由“向陽(yáng)紅10”船的后甲板沒(méi)入水中,入水后的“潛龍二號”開(kāi)始有了自主“行動(dòng)力”,只見(jiàn)一條黃色的“胖魚(yú)”迅速向下“游”去,很快,“胖魚(yú)”變成了一個(gè)黃色的小點(diǎn),消失在視野范圍之內。
“潛龍二號”的副總設計師趙宏宇說(shuō),2016年1月9日的準備階段,就是在為“潛龍二號”設置“衛星導航”的階段。由科研人員下放四個(gè)應答器,由超短基線(xiàn)對四個(gè)應答器進(jìn)行位置標定,謂之“測陣”。每個(gè)應答器之間距離大約為3公里,被輻射到的區域皆將成為“潛龍二號”的導航區域,AUV可以向應答器發(fā)射信號,通過(guò)接收到的訊息來(lái)判定自己所在的具體位置,從而進(jìn)行梳形搜索。此外,隨“潛龍二號”下水的還有一臺聲波通訊機,聲通訊機與AUV之間達成“溝通”,再由聲通訊機將“溝通結果”發(fā)送給船上的科研人員,以此達到實(shí)時(shí)監控的作用。“潛龍二號”的探測任務(wù)包括了海底地形地貌探測、熱液異常探測、磁力探測等內容。
“潛龍二號”在水中探測了9個(gè)小時(shí)左右時(shí)間,2016年1月12日下午6時(shí)左右,它自動(dòng)拋載上浮于“向10”船的南面,距離船體還有一定距離。在“向10”及4500米級AUV緩緩靠近的過(guò)程中,首先映入眼簾的是幾只信天翁,它們新奇地“盯著(zhù)”這臺巨大的黃“魚(yú)”,不停地用嘴啄。“嘭”的一聲巨響,“潛龍二號”拋出一條橘紅色牽引繩,再由科研人員發(fā)射一條打撈繩,兩根繩系好“水手結”,慢慢讓AUV浮至船尾,至此,回收工作的第一步告一段落。緊接著(zhù),科研人員用鉤子分別給“潛龍二號”的牽引環(huán)套上止蕩繩,緩緩用A架將“潛龍二號”吊起,重新固定在后甲板上。
2018年2月9日,“向陽(yáng)紅10”船抵達西南印度洋工作區,11時(shí)50分,“潛龍二號”順利布放入水進(jìn)行探測作業(yè)。這是“潛龍二號”大洋49航次的首次下潛,也是“潛龍二號”的第四十次下潛。此次下潛,“潛龍二號”在近海底工作30小時(shí),航程約70千米,最大潛深2920米,在地形起伏1800多米的區域內,獲得了大量的精細地形地貌數據和多種傳感器探測數據,表明“潛龍二號”具有高智能自主避障能力和穩定航行控制能力。本航次應用是“潛龍二號”連續第三年應用,說(shuō)明其在技術(shù)上完全具備了在洋中脊復雜地形中航行探測的能力,我國自主研發(fā)的水下自主機器人在技術(shù)上達到了國際先進(jìn)水平。
2018年4月6日,在西南印度洋執行中國大洋49航次科考任務(wù)的“潛龍二號”無(wú)人潛水器成功完成第50次下潛,并將在本航次科考任務(wù)結束后正式進(jìn)行技術(shù)升級。 (圖文資料來(lái)源于百度百科)


